

机器人焊钳(型号:JAG、JAM、JAM-S)
更新时间:2023-03-22 16:56:39 字号:T|T
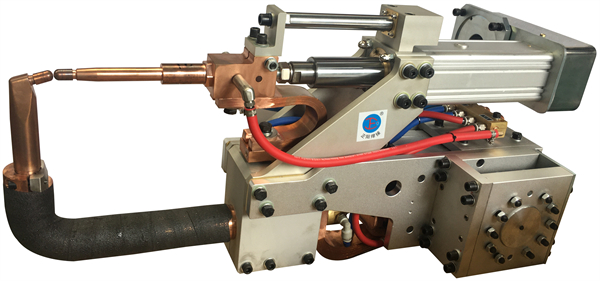

●焊钳主要由变压器,气缸或伺服电机、焊臂、浮动平衡装置,焊钳支架等部分组成;
●焊钳采用模块化设计,可选配不同功率的工频或中频变压器,执行机构采用不同行程和压力的气缸或伺服电机,可适应不同要求的多种组合;
●焊臂采用高强度铬锆铜冷弯或者合金铝型板或者强力黄铜铸造,******结构强度;
●与机器人机械连接采用标准接口,适配各主流机器人集成系统,特殊电气连接可根据客户要求定制。
应用现场
应用现场




 川公网安备:51012202001459号
川公网安备:51012202001459号



